|
(PDF)
The xyz coordinate axis system, denoted R3, is represented by three real number lines meeting at a common point, called the origin. The three number lines are called the x-axis, the y-axis, and the z-axis. Together, the three axes are called the coordinate axes.
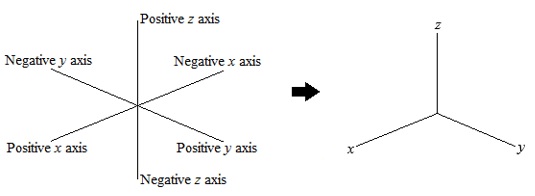
Perspective (and other forms of artistic license) is used to represent three physical dimensions on a two-dimensional sheet of paper. Below is a common way to represent the three coordinate axes of R3. At left are the entire three axes with their labels. To the right is a "cleaner" version where only the positive x, y and z axes are drawn. The three axes meet at right angles to one another.
The three axes divide R3 into eight regions, called octants. The region in which x, y and z are positive is called the first octant or the positive octant. The other octants are not numbered in any conventional way. Negative axes are drawn in only if the problem requires it. A point is represented by an ordered triple (x, y, z), in which from the origin (whose ordered triple is (0,0,0)), one moves x units along the x-axis, then y units parallel to the y-axis, and then z units parallel to the z-axis, to arrive at the point. The values x, y and z are the coordinates of the point. Example 1.1: Represent the point (2,3,5) on an xyz-coordinate axis system. Solution: Due to perspective, we may draw in guidelines to form a "box" in which one corner is the origin, and the opposite corner is the desired point: 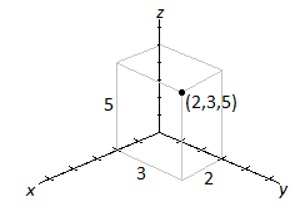
Other points are identified to show their relative positions in R3: 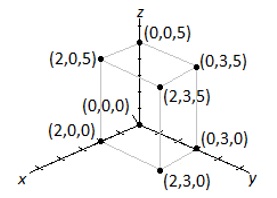
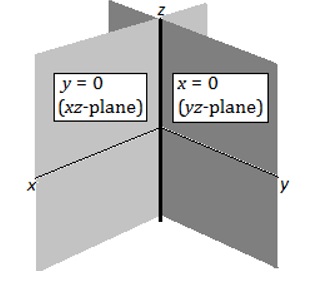
The point (2,3,0) is called a projection of (2,3,5) onto the xy-plane, found by setting z = 0. Other projections can be found similarly. The three coordinate axes, taken two at a time, form three coordinate planes. • The x-axis and the y-axis form the xy-coordinate plane and contains points whose ordered triples are of the form (x, y, 0). The equation z = 0 represents the xy-plane. • The x-axis and the z-axis form the xz-coordinate plane and contains points whose ordered triples are of the form (x, 0, z). The equation y = 0 represents the xz-plane. • The y-axis and the z-axis form the yz-coordinate plane and contains points whose ordered triples are of the form (0, y, z). The equation x = 0 represents the yz-plane. 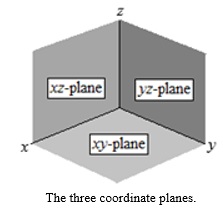
Example 1.2: The point (100,6,4) is closest to which coordinate plane? Solution: Since the z-value of 4 is the smallest of the three coordinates, the point (100,6,4) is closest to the xy-coordinate plane. Example 1.3: Given the point (4,−1,2), find its projections onto the xy-plane, the xz-plane and the yz-plane. Solution: The xy-plane is described by the equation z = 0, so the projection of (4,−1,2) onto the xy-plane is (4,−1,0). Similarly, the projection of (4,−1,2) onto the xz-plane is (4,0,2), and (4,−1,2) onto the yz-plane is (0,−1,2). Example 1.4: Given the point (4,−1,2), find its reflections across the xy-plane, the xz-plane, the yz-plane, and the origin. Solution: Points reflected across the xy-plane are found by negating the z coordinate. Thus, the reflection of (4,−1,2) across the xy-plane is (4,−1,−2). In a similar way, the reflection of (4,−1,2) across the xz-plane is (4,1,2), and the reflection of (4,−1,2) across the yz-plane is (−4,−1,2). To reflect across the origin, we negate all three coordinates. This is equivalent to reflecting a point across the xy-plane, then the xz-plane, then the yz-plane (in any order). Thus, the reflection of (4,−1,2) across the origin is (−4,1,−2), Example 1.5: Describe the intersection of the planes x = 0 and y = 0. Solution: The equation x = 0 is the yz-plane, and the equation y = 0 is the xz-plane, and they intersect at the z-axis. Points on the z-axis are described using set notation:
Example 1.6: Describe the equation x = 2 as it appears in R3. Solution: The equation x = 2 includes all points of the form (2, y, z). More generally, it can be described using set notation: It is a plane that is parallel to the yz-plane; equivalently, it is the yz-plane shifted two units in the positive x direction. Note that the equation x = 2 does not imply any restriction on the variables y and z. They can assume any real number value. It is important to remember the "space" in which x = 2 is defined. In R3, it is a plane. In R2, it would be a vertical line passing through (2,0). In R1 (or R), it is a point on the real number line. 
2. Distance & Midpoint Given two points A = (x0, y0, z0) and B = (x1, y1, z1) in R3, the distance between A and B is given by 
and the midpoint between A and B is given by 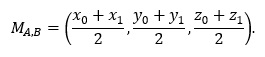
Note that the distance formula is the Pythagorean formula, and that the midpoint formula simply calculates the arithmetic mean (one at a time) of the x-coordinates, the y-coordinates and the z-coordinates. Example 2.1: Find the distance from the origin to the point (3,−1,5). Solution: The origin is (0,0,0), so the distance is 
Example 2.2: Given A = (−2,1,4) and B = (5,0,−7). Find the distance between A and B, and the midpoint of A and B. Solution: The distance between A and B is 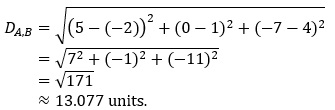
The midpoint between A and B is 
Example 2.3: Given A = (−2,1,4) and B = (5,0,−7). Find all points in R3 that are equidistant from A and B. Solution: Let P = (x, y, z) represent a point (represented as an ordered triple) equidistant from A and from B. Thus, by the distance formulas, we have 
Since P is equidistant from A and from B, we have D(P,A) = D(P,B). The radicals are squared away, then the binomials expanded by multiplication: 
The radicals are squared away: x2 + 4x + 4 + y2 − 2y + 1 + z2 − 8z + 16 = x2 − 10x + 25 + y2 + z2 + 14z + 49. Note that the squared terms cancel one another. We have The variable terms are collected to one side and the constant terms to the other: the equation 14x − 2y − 22z = 53 is true upon substitution by all points that are equidistant from A and B. This forms a plane Q in R3, which can be written as a set with z is isolated in terms of x and y: To check this, we can select arbitrary values for x and y. For example, let x = 11 and y = 22. This forces z = 57/22, so a point on Q is P = (11, 22, 57/22). The distance from A to P, and from B to P, are 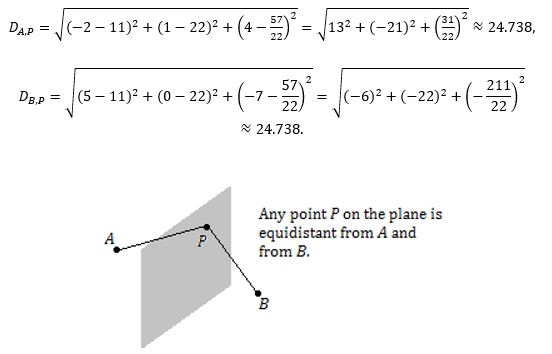
3. Triangles & Collinearity Three points A, B and C form a triangle in that A, B and C are the vertices (corners) of the triangle, and that line segments AB , AC and BC form the sides (edges). Letting a, b and c represent the lengths of the sides of a triangle, and assuming c is the largest of the three values, the triangle inequality states that c ≤ a + b, which simply states that the longest side of a triangle cannot be greater than the sum of the lengths of the two shorter sides: 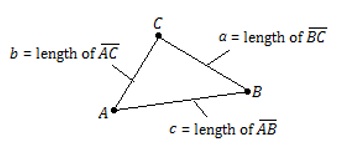
If c = a + b, then the length of the longest side is exactly the sum of the lengths of the two shorter sides, which can only happen when points A, B and C lie on a common line. In such a case, points A, B and C are collinear. The three side-lengths of a triangle are related by the law of cosines: where c is assumed to be the length of the longest side and θ is the angle formed at point C, where side segments AC and BC meet. If θ = 90°, then cos θ = 0, and we have the Pythagorean Formula, which relates the three side-lengths of a right triangle:
Example 3.1: Show that the points A = (1,0,2), B = (−2,3,1) and C = (0,4,−2) are the vertices of a right triangle. Solution: Find the lengths of the three sides of the triangle: 
The length of the segment AC is the longest, and we use the Pythagorean Formula: 
Since 33 = 19 + 14 is a true statement, the triangle formed by A, B and C is a right triangle. When sketching a triangle, we can name the sides as is convenient. In the preceding example, segment AC would be given length b, if we followed the drawing on the previous page. This is fine, as long as in this case, we remember that b is the length of the longest side, and that c and a are the lengths of the two shorter sides. Example 3.2: Show that A = (2,3,5), B = (6,1,6) and C = (14,−3,8) are collinear. Solution: If A, B and C lie on the same line, then the largest distance between any of the three points will be equal to the sum of the two smaller distances. The distances are: 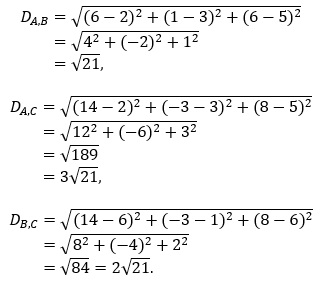
Note that the distance between A and C is the longest, and that it is the sum of the distance between A and B, and the distance between B and C. That is, 3√21 = 2√21 + √21, and so we conclude that A, B and C are collinear.
4. Spheres & Ellipsoids A sphere is a set of ordered triples (x, y, z) that are of a fixed distance from a single fixed point (x0, y0, z0), called the center, and the distance is called the radius, r. Using the distance formula, the simplified formula for a sphere can be written as
Example 4.1: Find the equation of a sphere with center (2,−1,9) and radius 5. Solution: The sphere is given by which simplifies to (x − 2)2 + (y + 1)2 + (z − 9)2 = 25. Example 4.2: Find the equation of a sphere on which the two points A = (4,1,−1) and B = (6,7,9) lie directly opposite one another (that is, the line through them forms a diameter of the sphere. Such points are called antipodal points). Solution: The center is the midpoint of A and B: 
The distance from the midpoint to point A is: 
(This is also the distance from the midpoint to B.) This is the radius, and since r = √35, then r2 = 35. Thus, the sphere is • • • • • • • • • • • Example 4.3: Find the equation of the largest possible sphere with center (4,2,5) that is fully contained within the first octant (tangentially "touching" a coordinate plane is permissible). Solution: The y-coordinate of 2 is the smallest of the three coordinates, and is 2 units from the xz-coordinate plane. This will be the radius. Thus, the sphere is given by
Example 4.4: The sphere (x + 6)2 + (y − 1)2 + (z − 4)2 = 100 intersects the yz−coordinate plane, forming a circle. What is the radius of this circle? Solution: The yz-coordinate plane is given by x = 0, so we substitute this into the equation of the sphere, and simplify: 62 + (y − 1)2 + (z − 4)2 = 100 (y − 1)2 + (z − 4)2 = 64. The intersection of the sphere with the yz-coordinate plane results in a circle of radius √64 = 8. A sphere may also be written as x2 + y2 + z2 + Dx + Ey + Fz = G, in which case completing the square is needed to rewrite the sphere in simplified form. Example 4.5: Find the center and radius of the sphere x2 + 2x + y2 − 6y + z2 + 4z = 22. Solution: Complete the square three times: 
Simplified, we have Thus, the sphere has a center of (−1,3,−2) and a radius of r = √36 = 6. Example 4.6: Explain why x2 + y2 + z2 + 4x + 6y + 10z + 50 = 0 cannot represent a sphere. Solution: Completing the square three times, we have (x + 2)2 + (y + 3)2 + (z + 5)2 = −12. The right side of the equation is negative, while the left side of the equation will always be a non-negative value, so this equation cannot have a solution in R3. This equation is inconsistent (has no solutions). An axis intercept in R3 is found by setting two of the variables to 0. Thus, the x-axis intercept is given by the ordered triple (x, 0, 0), the y-axis intercept is given by the ordered triple (0, y, 0), and the z-axis intercept is given by the ordered triple (0,0, z). Example 4.7: Find the axis intercepts of the sphere (x + 1)2 + (y − 4)2 + (z − 6)2 = 41. Solution: When x = 0 and y = 0, we have 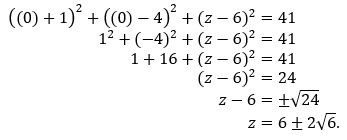
There are two z-axis intercepts, at (0, 0, 6 + 2√6) and (0, 0, 6 − 2√6). When x = 0 and z = 0, we have 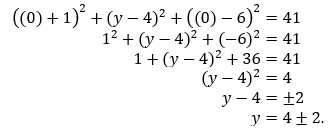
There are two y-axis intercepts, at (0,6,0) and (0,2,0). When y = 0 and z = 0, we have 
Taking the square root of −11 results in a non-real value. Thus, there are no x-axis intercepts. Ellipsoids An ellipsoid centered at the origin is written in the form 
where (±a, 0, 0) are the x-axis intercepts, (0, ±b, 0) are the y-axis intercepts, and (0, 0, ±c) are the z-axis intercepts. The semi-principal axis radii are a, b and c, respectively. The semi-principal diameters are 2a, 2b and 2c. If the ellipsoid is centered at (x0, y0, z0), the equation becomes 
Example 4.8: Find the axis intercepts of the ellipsoid
Solution: The x-axis intercepts are (±3, 0, 0), the y-axis intercepts are (0, ±1, 0) and the z-axis intercepts are (0, 0, ±2√3). Note that this ellipsoid is centered at the origin. The semi-principal radii are 3, 1 and 2√3 units in the direction of the x-axis, y-axis and z-axis, respectively. The semi-principal diameters are twice these figures, or 6, 2 and 4√3 units in the direction of the x-axis, y-axis and z-axis. Completing the square may be necessary to determine the ellipsoid's center and axis radii. Example 4.9: Find the center, the semi-principal axis radii, and the axis intercepts of Solution: Group the terms by variable, and factor any constants from each grouping: x2 + 2x + 2(y2 − 4y) + 4(z2 + 6z) = −5. Complete the square three times: (x + 1)2 + 2(y − 2)2 + 4(z + 3)2 = 40. Note that the 8 on the right side is the "2 times 4" on the left side, and the 36 on the right is the "4 times 9" on the left. Divide now by 40: The ellipsoid's center is (−1,2,−3) and its semi-principal axis radii are a = √40 = 2√10 in the direction parallel to the x-axis, b = √20 = 2√5 in the direction parallel to the y-axis, and c = √10 in the direction parallel to the z-axis. For the axis intercepts, we set two variables to 0, and solve for the third variable. For example, to find the z-axis intercepts, set x = 0 and y = 0. This can be done in the original equation: (0)2 + 2(0)2 + 4z2 + 2(0) − 8(0) + 24z = −5 4z2 + 24z + 5 = 0. Using the quadratic formula, we have 
Thus, the z-axis intercepts are (0, 0,−3 ± (1/2)√31). In a similar way, the y-axis intercepts are (0, 4 ± √6, 0). There are no x-axis intercepts (you verify).
|