|
(PDF)
Up to this point, we have presented vectors with constant components, for example, 〈1,2〉 and 〈2,−5,4〉. We now allow the components of a vector to be functions of a common variable. For example, r(t) = 〈2t + 1, t2 + 3〉 presents a function whose input is a scalar t, and whose output is a vector in R2. Such a function is called a vector-valued function and t is called a parameter variable. The common notation is to write r(t) = 〈x(t), y(t)〉 for vector-valued functions in R2, and r(t) = 〈x(t), y(t), z(t)〉 for vector-valued functions in R3. The number of parameter variables can be greater than one. Example 15.1: Sketch r(t) = 〈2t + 1, t2 + 3〉 for −1 ≤ t ≤ 2. Solution: Let's build an input-output table: 
We then sketch vectors for each t such that its foot is at the origin: 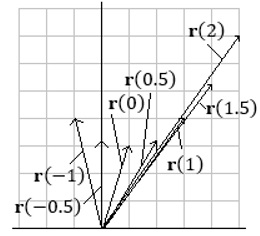
This looks like a mess, but it is a truthful and literal representation of r(t) = 〈2t + 1, t2 + 3〉 for certain values of t in the interval −1 ≤ t ≤ 2. However, when representing the graph of a vector valued function, it is common to only show the position at the head of the vector, and the curve that results. 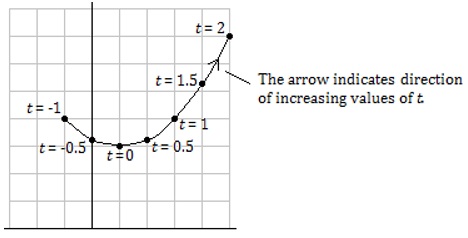
This image is much cleaner, and we see that the path traced out by the heads of the vectors given by r(t)=〈2t + 1, t2 + 3〉 for −1 ≤ t ≤ 2 forms a parabola. Note that some of the t values are stated at certain points. It is common to place an arrow on this path to show the direction of increasing value of the variable t. Example 15.2: Sketch r(t) = 〈a cos t, a sin t〉, for 0 ≤ t ≤ 2π, and describe the curve that is traced out by the vectors. Solution: We build an input-output table: 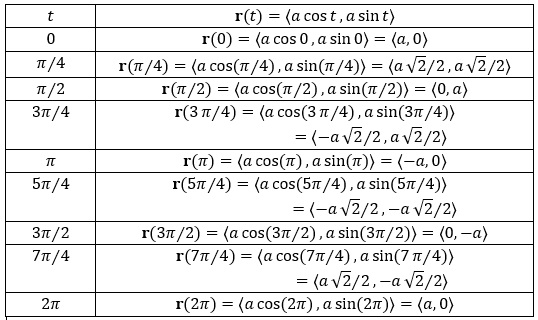
The curve is below. The vectors are not actually drawn. Instead, the curve formed by the placement of each vector's head is drawn. 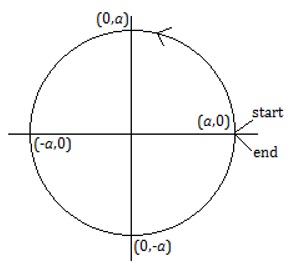
The curve is a circle of radius a, centered at the origin. The bounds 0 ≤ t ≤ 2π ensure that exactly one revolution of the circle is sketched. Note that certain points on the path are given by ordered pairs. Remember that these are the heads of the vectors, which are not drawn. Thus, the point (0, a) represents the head of the vector 〈0, a〉 when t = π/2. The arrow shows the direction of increasing t, and the circle "starts" at the point (a, 0) and ends at this same point, one revolution later. There is more than one way to define a circle of radius a. For example, r(t) = 〈a sin t, a cos t〉, for 0 ≤ t ≤ 2π traces the same circle, but this time starting at (0, a) and in the clockwise direction. Example 15.3: Rewrite the function y = f (x) = x3 from (0,0) to (3,27) as a vector-valued function. Solution: Any function of the form y = f (x) can be rewritten as a vector-valued function by letting x(t) = t and y(t) = f (t). Thus, the function y = f (x) = x3 from (0,0) to (3,27) can be re-written as Note that r(0) = 〈0,0〉 and that r(3) = 〈3,27〉. These are vectors whose heads lie at the points (0,0) and (3,27) respectively. Example 15.4: Find the domain of 
Solution: The domain is the largest subset of the real numbers for which all three component functions are defined simultaneously. Note that x(t) = t and y(t) = 2t are defined for all real numbers t, but that z(t) = 1/(3 − t) is not defined when t = 3. Thus, the domain of r is given by {t|(−∞, 3) ∪ (3, ∞)}. Example 15.5: Find the domain of 
Solution: The first component x(t) = 2/t requires that t ≠ 0, and the second component y(t) = √(4 − 3t) requires that 4 − 3t ≥ 0, or t ≤ 4/3. There are no restrictions on t implied by z(t) = et. Thus, the domain of r is given by {t|(−∞, 0) ∪ (0, 4/3]}. Example 15.6: Find a vector valued function that describes the line segment in R3 from (1,−2,5) to (3,1,−4). Solution: Find the direction vector: Using (1,−2,5) as the initial point, we have 〈1,−2,5〉 + t〈2,3,−9〉 as the line segment using vector notation. As a vector-valued function, we have Note that r(0) = 〈1,−2,5〉, a vector whose head lies at the point (1,−2,5), and that r(1) = 〈3,1,−4〉, a vector whose head lies at the point (3,1,−4). Example 15.7: Describe r(t) = 〈2 cos t, 2 sin t, t〉 for t ≥ 0. Solution: This is a curve in R3. Look at two of the components at a time: • The components x(t) = 2 cos t and y(t) = 2 sin t trace a circle of radius 2 repeatedly since t increases without bound. • The components x(t) = 2 cos t and z(t) = t trace a cosine wave "upward", e.g. assuming that x is the horizontal axis and z the vertical axis. • The components y(t) = 2 sin t and z(t) = t trace a sine wave "upward". The curve is a helix, which looks like a coiled spring. This helix has a radius of 2 centered around the positive z-axis, "wrapping" around the z-axis (but never touching it) as t increases in value. Example 15.8: In R3, the circular cylinder x2 + y2 = 25 is intersected by the plane y + z = 4. Find a vector-valued function r(t) = 〈x(t), y(t), z(t)〉 that describes the curve formed by the intersection of these two surfaces. Solution: There are many possible vector-valued functions that describe this curve. One possible way is to note that we can write x(t) = 5 cos t and y(t) = 5 sin t for 0 ≤ t ≤ 2π. Then, since y + z = 4, we have z = 4 − y, so that z(t) = 4 − 5 sin t. The curve of intersection is given by
The number of parameter variables of a vector-valued function describe the "type" of graph that will result. For example, a vector-valued function of one parameter variable will result in a curve, as demonstrated in the previous examples. A vector-valued function of two variables results in a surface, as the next two examples show. Example 15.9: A circular cylinder of radius 2 is centered at the origin such that the x-axis is the axis of symmetry of the cylinder. Describe this surface parametrically, using u and v as the parameter variables. Solution: Since the x-axis is the axis of symmetry, we infer that the circular cross sections lie on planes parallel to the yz-plane. For example, a circle of radius 2 on the yz-plane (x = 0) is described by y2 + z2 = 4. Using parameter variable u, we can describe the circle by letting y = 2 cos u and z = 2 sin u, where the 2 represents the circle's radius. Note that the circular cross-sections depend only on variable u. Thus, we can let x = v, representing the extension of the circle into the positive and negative x direction, with no restrictions on v. The cylinder is described parametrically as
Example 15.10: Describe the cone
parametrically using variables u and v. Solution: Observe that cross sections of this surface with a plane z = k results in a circle of radius k. Thus, if we let z = u, we can then define x = u cos v and y = u sin v, which result in circles of radius u. Thus, we have r(u, v) = 〈u cos v, u sin v, u〉, where 0 ≤ v ≤ 2π and u ≥ 0. 16. Limits & Continuity
The same notions of limits and continuity hold true for vector-valued functions. For example, the limit of r(t)=〈x(t),y(t),z(t)〉 as t → a is given by 
assuming that all three limits exist. Similarly, a vector-valued function r(t) = 〈x(t), y(t), z(t)〉 is continuous at t = a if
Example 16.1: Let 
find limt→2 [r(t)]. Is r continuous at t = 2? Solution: The limit is 
Note that r(2) = ⟨4, e2, 1/5〉. Since all three conditions of continuity are met, the curve traced out by r(t) = ⟨t2, et, 1/(t + 3)〉 is continuous at t = 2. In this example, the limit of r as t → −3 does not exist since the limit fails to exist for the expression 1/(t + 3). This curve is not continuous when t = −3. It is continuous everywhere else. Example 16.2: Given 
find limt→3 [r(t]. Is r continuous at t = 3? Solution: Note that the domain of r excludes the value t = 3. However, the limit does exist as t → 3, since 
The middle expression simplifies as (t2 − 9)/(t − 3) = (t + 3)(t − 3)/(t − 3) = t + 3, then the limit is taken. However, the value t = 3 is still excluded from the domain, so r is not continuous at t = 3. There is a deleted point in the curve when t= 3. 17. Differentiation

assuming that the derivatives exist. Note that r′(t) = 〈x′(t), y′(t), z′(t)〉 is itself a vector-valued function. Visually, the vectors given by r′(t) can be shifted in such a way so that they are tangent to the curve traced out by r(t) = 〈x(t), y(t), z(t)〉. In a physical setting, if r(t) = 〈x(t), y(t), z(t)〉 represents the displacement of an object, then v(t) = r′(t) = 〈x′(t), y′(t), z′(t)〉 represents the object's velocity and the magnitude, |r′(t)|, is the object's speed. Acceleration is a(t) = v′(t) = r″(t) = 〈x″(t), y″(t), z″(t)〉. Example 17.1: An object moves through R3 along a path defined by r(t)=〈t3, 2t2 + t, 5t〉 where all dimensions are in meters. Find the object's velocity and its speed when t = 4 seconds. Solution: The derivative of r(t) = 〈t3, 2t2 + t, 5t〉 is r′(t) = 〈3t2, 4t + 1, 5〉. Thus, when t = 4 seconds, the object has a velocity of r′(4) = 〈3(4)2, 4(4) + 1, 5〉 = 〈48,17,5〉. The object's speed at t = 4 seconds is |r′(4)| = √(482 +172 + 52) = 51.2 meters per second. Example 17.2: An object moves through R2 along a path defined by r(t)=〈t, −4.9t2 + 24t〉, where the first component is the horizontal displacement in meters, and the second component is vertical displacement in meters, and where t is in seconds. Find the maximum height that this object achieves. Solution: Note that the object traces a downward-opening parabolic arc in R2. The object will achieve its maximum height when the vertical component of velocity of the object is temporarily 0. Thus, we differentiate: v(t) = r′(t) = 〈1, −9.8t + 24〉. We then set the vertical component of velocity to 0, and solve: This is the time at which the object achieves its maximum height. When we substitute t = 2.449 into r, we have The object achieves a maximum height of about 29.388 meters above the ground after 2.449 seconds in flight. The object has moved 2.449 meters horizontally in this same period of time. Example 17.3: An object moves through R2 along a path defined by r(t) = 〈t3, t2 + 2t〉, where the components are in meters and t is in seconds. What is the minimum speed of the object? Solution: The derivative is r′(t) = 〈3t2, 2t + 2〉, so that the speed can be now stated as a function in variable t: 
We now minimize s(t): 
This expression is 0 when the numerator is 0. Using a calculator, we find that 36t3 + 8t + 8 = 0 when t = −0.485 seconds. This can be verified to be a minimum by using either the first or second derivative test. Thus, the object's minimum speed occurs when t = −0.485 seconds and is 
Example 17.4: An object moves through R2 along a path defined by r(t) = 〈2t2 + 1, t4〉. Find the equation of the tangent line in vector form when t=5. Solution. The derivative is r′(t) = 〈4t, 4t3〉. Thus, when t = 5, the object is moving (instantaneously) in the direction of r′(5) = 〈4(5), 4(5)3〉 = 〈20, 500〉. This is the object's direction vector. Furthermore, at t = 5, the object's location is r(5) = 〈2(5)2 + 1, (5)4〉 = 〈51, 625〉. Thus, the object's tangent line in vector form when t = 5 is 〈51, 625〉 + t〈20, 500〉, or equivalently, 〈51 + 20t, 625 + 500t〉. Example 17.5: An object moves through R3 along a path defined by r(t) = 〈t + 3, t2 + t, 5t〉. Find the equation of the tangent line to this path when the object is at (7,20,20). Solution: As in the previous example, we need both a direction vector and a position vector. The location (7,20,20) corresponds to a position vector 〈7,20,20〉, and setting this equal to r(t) = 〈t + 3, t2 + t, 5t〉, we can deduce that t = 4. The derivative is r′(t) = 〈1, 2t + 1, 5〉, so the direction vector is r′(4) = 〈1, 2(4) + 1, 5〉 = 〈1,9,5〉. Thus, the object's tangent line in vector form at this instant is 〈7,20,20〉 + t〈1,9,5〉, or equivalently, 〈7 + t, 20 + 9t, 20 + 5t〉. Example 17.6: An object revolves around the origin in a circular orbit. The circle is of radius 5 meters and the object completes a revolution every 10 seconds. Assume the object moves counter-clockwise and that is started on the positive x-axis. Find this object's position (displacement), velocity, speed and acceleration at time t. Solution: Let's assume that 0 ≤ t ≤ 10 seconds represents one revolution of the object. Then, the object's displacement is given by 
The leading coefficient 5 represents the radius, and note that when t = 10, the arguments within the sine and cosine operators are both (π/5)(10) = 2π, the usual period of the sine and cosine functions. The velocity is 
where the chain rule was used followed by simplification. Note that r(t) · v(t) = 0. This is always true for objects moving in a circular path: the (tangential) velocity vector is orthogonal to the displacement vector. The object's speed is 
meters per second. This makes sense: the circumference of the object's path is 2π(5) = 10π meters. If it takes the object 10 seconds to complete one revolution at π meters per second, then it will have travelled a distance of 10π meters in that revolution. The acceleration is 
Note that the acceleration vector is always opposite the displacement vector for an object in circular motion. 18. Integration Given a vector-valued function r(t) = 〈x(t), y(t), z(t)〉, the indefinite integral of r with respect to t is given by 
where 〈a, b, c〉 is a vector composed of the constants of integration of the components of r. Example 18.1: Find ∫r(t) dt, where r(t) = 〈3t2, 1/t, sin (3t)〉, where t > 0. Solution: We have 
Example 18.2: Find r(t) = ∫ r′(t) dt, where r′(t) = 〈e2t, √t, sin t〉, and r(0) = 〈0,0,0〉. Solution: Note that r(t) = ∫ r′(t) dt + k, where k = 〈a, b, c〉 is a constant vector. We have 
Since r(0) = 〈0,0,0〉, we have 
This forces a = −1/2, b = 0 and c = 1. Thus, 
Don't confuse r(0) = 〈0,0,0〉 as being the constant vector 〈a, b, c〉. Example 18.3: An object's acceleration is given by a(t) = 〈0, t〉, where t is in seconds and the components are meters per seconds-squared. Find v(t) and r(t) such that v(1) = 〈2,5〉 and r(1) = 〈−1,3〉. Solution: Integrating acceleration, we obtain velocity: 
To find k = 〈k1, k2〉, note that v(1) = 〈2,5〉: 
This forces k1 = 2 and k2 = 9/2, so that v(t) = 〈2, (1/2)t2 + 9/2〉. Next, we have 
To find m = 〈m1, m2〉, we note that r(1) = 〈−1,3〉: 
This forces m1 = −3 and m2 = −5/3. Therefore, 
Example 18.4: Find 
where 
Solution: Integrate. Note that u-du substitution is used for the latter two components. 
19. Arc Length
Suppose the vector-valued function r(t) = 〈x(t), y(t), z(t)〉 is defined over the closed interval a ≤ t ≤ b and differentiable over the open interval a < t < b. Visually, this means that r is a smooth curve, with no discontinuities or corners. The arc length s of the curve r over the interval a ≤ t ≤ b is given by the definite integral 
Note that the integrand is the same as |r′(t)|. Thus, we can write the integral as 
Example 19.1: Find the length of the curve traced by r(t) = 〈2 cos t, 2 sin t〉 for 0 ≤ t ≤ π. Solution: Find the derivative: r′(t) = 〈−2 sin t, 2 cos t〉. Then, using the arc length formula, we have 
The arc length is 2π units. This can be verified using geometry: r traces a semicircle of radius 2. The circumference of a circle of radius 2 is 2π(2) = 4π, and half of this figure is 2π. Example 19.2: Find the arc length of the curve traced by r(t) = 〈4t, 2t2, 2 ln t〉 between the points (8,8,2 ln 2) and (20,50,2 ln 5). Solution: The derivative is r′(t) = 〈4, 4t, 2/t〉. Furthermore, the bounds of t can be inferred from the points. The point (8,8,2 ln 2) suggests that t = 2 and the point (20,50,2 ln 5) suggests that t = 5. We have 
Example 19.3: Find the arc length of the curve traced by r(t) = 〈t2, 3t, 4t3〉 for 1 ≤ t ≤ 3. Solution: The derivative is r′(t) = 〈2t, 3, 12t2〉. Thus, the arc length is given by 
Using a calculator or any numerical method of integrating, we find that the arc length is about 104.58 units. Example 19.4: Find the length of the helix traced by r(t) = 〈2 cos t, 2 sin t, t〉 for 0 ≤ t ≤ 2π. Solution: The derivative is r′(t) = 〈−2 sin t, 2 cos t, 1〉. We have 
Arc Length as a Function Consider the arc length formula, s = ∫[a, b] |r′(t)| dt, and allow the upper bound to be a variable rather than a fixed value. If we allow the upper bound to be t, and use a dummy variable within the integral, we have arc length s as a function of t: 
Differentiating both sides with respect to t, we have 
Using the Fundamental Theorem of Calculus, we have 
Thus, we have 
This formula is extremely useful later on! Do not forget it!
20. Unit Tangent and Unit Normal Vectors
Consider an object that moves along a differentiable (smooth, no discontinuities) curve traced by r(t) = 〈x(t), y(t), z(t)〉. At each point on the curve, the tangent vector is given by r′(t) = 〈x′(t), y′(t), z′(t)〉. The magnitude of the tangent vector, |r′(t)|, can be interpreted as the object's speed. For most curves, not surprisingly, the speed of an object can vary. In a rough sense, the speed of an object dictates the segmentation of the curve. Example 20.1: Sketch the curve traced by r(t) = 〈t, t2〉 for 0 ≤ t ≤ 4. Solution: The curve is shown below. It is a parabola y = x2 from (0,0) to (4,16). The values for integer values of t are shown on the graph. 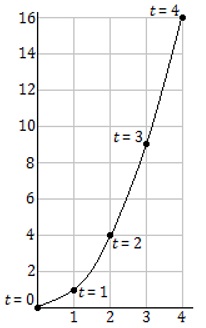
The segments of the curve between consecutive integer values of t vary in length. If t is a unit of time, then the object traverses each segment in the same amount of time. Thus, the object must move faster in order to traverse longer segments. The segmentation of the curve in terms of a unit time interval t is not consistent. The table below shows the object's position, velocity and speed for integer values of t: 
To control the speed of the object, we can force all tangent vectors to have a length of 1 unit. This is called the unit tangent vector, and is given by 
This means that |T(t)| = 1. Example 20.2: Find T(t), where r(t) = 〈t, t2〉. Solution: From the previous example, we have r′(t) = 〈1, 2t〉 and |r′(t)| = √(1 + 4t2). Thus, 
You should verify that |T(t)| = 1. If the object moves along this curve at a constant speed of 1 unit of distance per unit of time, then this will force the segmentation of the curve into equal-sized segments, so that it can traverse the same length each time, per unit of time. This is often called the ds segmentation. Example 20.3: Find T(t), where r(t) = 〈3 cos t, 3 sin t, t〉. Solution: We have 
Note that in this case, the speed of the object is always √10 units of distance per unit of time. The unit normal vector is given by 
The vector N has a length of 1 unit. It is orthogonal to T (that is, N · T = 0). For an object moving along a differentiable curve, T will point in the object's (tangential) direction of travel, and N will point orthogonal to T, representing one component of acceleration. It generally points "inward" to concave side of the curve. Example 20.4: Find N(t), where r(t) = 〈t, t2〉. Solution: From Example 20.2, we have 
We now find T′(t): 
Now, we need |T′(t)|: 
This simplifies after many steps to 
Thus, the unit normal N is given by 
Note the similarities in T and N and note also that N · T = 0. Example 20.5: Find N(t), where r(t) = 〈3 cos t, 3 sin t, t〉. Solution: From Example 20.3, we have 
We find T′(t): 
Note that 
Thus, 
Observe that |N(t)| = 1 and that N · T = 0.
|